



In the maintenance work of the nuclear power plants and facilities, there are many locations where the works by field workers are difficult or impossible, due to the conditions such as small space or narrow gap, under-water, high radiation dose rate, etc. To solve these problems, many robots are applied for the maintenance work as a means to perform the works in place of the workers (Fig. 1).
MHI has developed the typical maintenance and inspection robots in order to realize the wide variety of required work contents.
1. RV Inspection Robot
2. Maintenance and inspection robot for RV Inlet and Outlet nozzles
3. Repair Robot for SG Inlet and Outlet Nozzles
4. Inspection Robot for SG Inlet and Outlet Nozzles

Fig. 1 Maintenance and Inspection Robot Lineups for Nuclear Power Plant
Phase 3 : Publicly accepted phase
- (1) Components: PWR:RV, SG, etc.
- (2) Location: Welds of vessels, Dissimilar welds of inlet / outlet nozzle
- (3) Material: Nickel alloy, low alloy steel, stainless steel
- (4) Condition: Locations of high radiation dose rate, small space or narrow gaps
In-air, under-water
- (1)Radiation dose reduction of workers by applying robots to maintenance work
Radiation dose of field workers can be reduced by utilizing the robots that perform the maintenance works instead of field workers.
- (2)Multi-functionalization of the robots by using versatile multi-joint manipulator
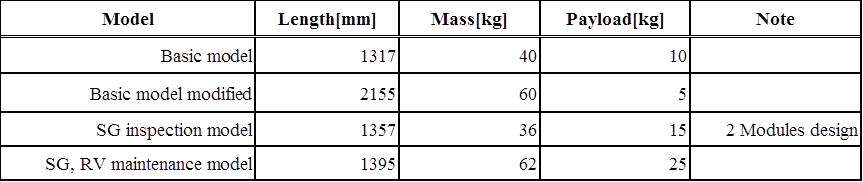
The manipulator developed by MHI is a small size and light weight one, having wide operating range and big payload weight for its size and weight (Table1). Also, a wide variety of maintenance work can be realized by exchanging the tools to be attached at the tips of the manipulators.
The versatile manipulators installed in the robots mentioned above can provide a wide variety of maintenance work only by changing the software, without any change of hardware. This produces the following merits.
・Improvement in reliability
・Shortening of a manufacture period
・Improvement in maintenance workability
Table1 Specification of manipulator
- (3)Wire saving by mounting small control boards to robots
Mounting the small control boards on the robots, the wiring and cabling can be saved, which can be obstacles during the works, etc. in locations of small space or narrow gap.
4 types of maintenance and inspection robots are developed by MHI as follows.
5.1. RV Inspection Robot
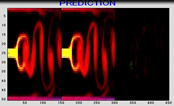
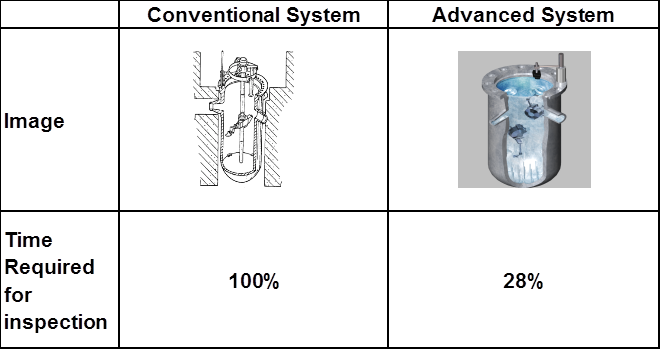
This robot is applied to the ultrasonic testing as non-destructive examination works to confirm the integrity of the welds of RV in the PWR nuclear power plants (Fig. 2).
As the inspection is carried out in the RV filled with water, the robot has waterproof structure, consisting of a remotely-operated underwater vehicle, mounting a basic model modified manipulator on the vehicle, which can freely move inside the RV by thruster (propeller).
After moving to the vicinity of the weld line of the inspection object location, the robot sticks to the wall surface of the RV. After that, the inspection is carried out by moving the tip tool for inspection with the manipulator.
Multiple types of the tip tools are necessary for each inspection object location of the RV. However, all the tip tools can be mounted on the manipulator, and one robot can perform the inspections for all the RV weld lines by changing the tools sequentially.
Furthermore, the wiring can be saved by mounting control boards (power units, servo drivers, IO units, etc.) on the vehicle.
Using this system, the following items are possible, and process reduction was conventionally attained about 72% compared with conventional system for PWR 4 loop plant (Table 2).
・Two-set simultaneous inspection
・Shortening of robot positioning time
・Shortening of equipment installation time

Fig.2 RV Inspection Robot
Table 2 Comparison of Conventional System and Advanced System
5.2. Maintenance and Inspection Robot for RV Inlet and Outlet Nozzles
This robot is applied to the internal surface INLAY work [1] of the welds of the RV inlet and outlet nozzles, and is specified for the multiple inlet and outlet nozzles that are simultaneously subjected to the remote work (Fig. 3).
This robot consists of the RV maintenance model manipulator, the manipulator base, the turn table, the specialized crane, and the purpose-built equipment and these are installed in the cylindrical container to make the inside of the nozzle an atmospheric environment, that is carried in on a case-by-case basis of the work.
The functions of the respective constituents are as follows.
① Manipulatior
Perform the works with light load such as inspection, welding, etc. in the nozzle.
- ② Manipulator base
Move the manipulator in the RV to approach the inlet and outlet nozzles.
- ③ Turn table
Carry in and out the purpose-built equipment, etc. into the inlet and outlet nozzles.
- ④ Specialized crane
Carry various types of equipment into and out of the cylindrical container.
- ⑤ Purpose-built equipment
For example, it is the excavating device for internal surface of the nozzle and the tool magazine installed the tip tools for the manipulator.
For the operation of the works with the manipulator, the tools are mounted on the tool magazine and the robot is installed on the turn table by the specialized crane. The work is performed while the manipulator itself exchanges the tools on the magazine.
When the work is performed with the purpose-built equipment, the equipment is installed on the turn table by using the specialized crane. After that, the purpose-built equipment is carried in and installed inside the nozzle with the turn table, and the work is performed inside the nozzle.
The wiring via the cylindrical container can be saved by mounting control boards (power units, servo drivers, IO units, etc.) on the bottom of the container.
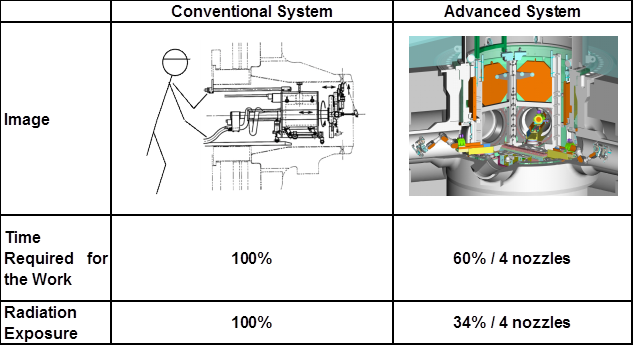
As the operation which this robot is applied to, the following items are possible and process reduction about 40% per four nozzles and reduction of radiation exposure about 66% per one nozzle were conventionally attained compared with conventional system (Table 3).
・Increase of the number of nozzles which can work robot simultaneously ( 2 nozzles → 4 nozzles
・The robot's introduction which can be operated by remote control
・Shortening of tool exchanging time
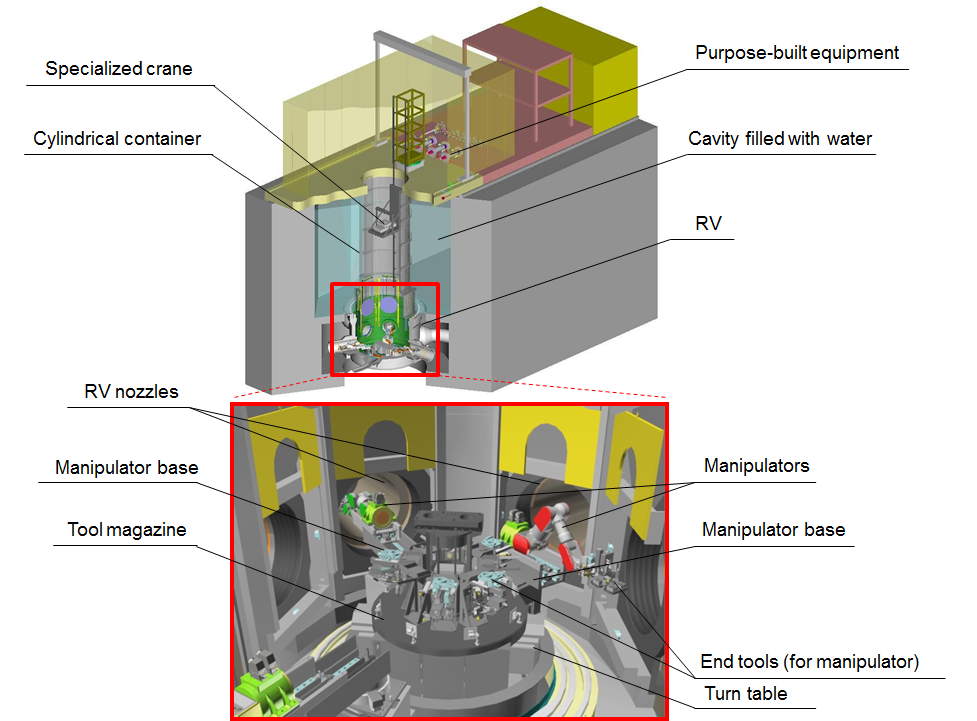
Fig.3 RV Maintenance Robot
Table3 Comparison of Conventional System and Advanced System
5.3. Repair Robot for SG Inlet and Outlet Nozzles
This robot [2][3] is applied to the works for inspection, the stress relaxation and various repairs for the inlet and outlet nozzles of the SG of the PWR nuclear power plants (Fig. 4 movie).
We have developed this robot for the purpose of robotization inside and around the channel head as much as possible, in order to reduce the radiation dose of the workers.
This robot consists of a turning strut and a slide table which are base for the SG maintenance model manipulator, installed in the SG channel head. The tip tool can be exchanged by locating the tip of manipulator outside of the channel head through the manhole.
Thereafter, it is possible to measure the shaft center of the inlet and outlet nozzles using the manipulator within the channel head, and the remote inspection, stress relaxation, and repair can be performed by the robot.
Fig. 4 SG Nozzles Maintenance Robot
5.4.Inspection Robot for SG Inlet and Outlet Nozzles
This robot is applied to the inspection work to confirm the integrity of the inlet and outlet nozzles of the SG with the non-destructive examination such as ECT or UT (Fig. 5).
The robot introduced in Paragraph 5.3 had been challenged with the radiation dose reduction of the workers because the workers are exposed high radiation dose in the SG channel head during installation of the turning strut and the slide table.
This robot consists of the robot walking on the tube sheet surface, which is a base of the manipulator from outside of the channel head and the SG inspection model manipulator, for the purpose of further radiation dose reduction of the workers. The work can be performed without involving the human work in the channel head.
Also, since this robot can walk on the tube sheet surface and move to any location of the tube sheet surface, the robot can be applied not only to the inspection of the nozzle portions but also to the other maintenance work in the channel head.
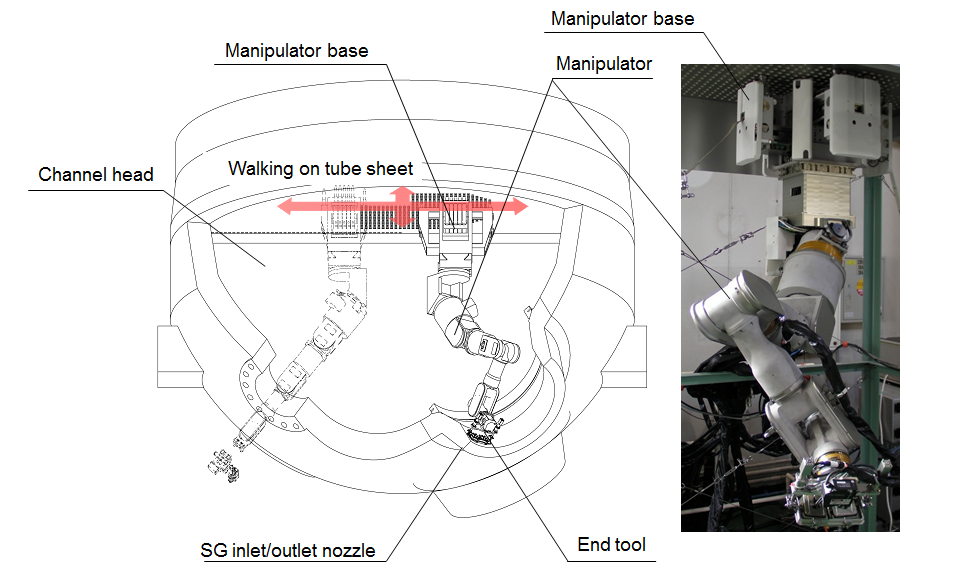
Fig.5 SG Nozzles Inspection Robot
By applying the manipulator developed by MHI to maintenance work, reduction of radiation exposure, process reduction, and work range expansion were attained. Those further improvements are aimed at by performing the following development from now on.
- Improvement for the autonomy and operability
The latest control technology and sensing technology will be incorporated into the robots to improve the autonomy and operability and thereby reduce field workers’ loads. - Installation of the mechanism for moving.
The moving mechanism will be installed in the robot to reduce some work processes for preparation and installation of the robot by field workers.
- [1]MITSUBISHI HEAVY INDUSTRIES, LTD. (MHI); “Advanced INLAY System for Reactor Vessel of PWR”, Vol. 4, No3, Nov 2012, http://www.jsm.or.jp/ejam/Vol.4No.3/NT/NT49/article.html
- [2]Shinro Hirano, et.al, Nuclear Power Division, the Kansai Electric Power Co.,Inc., Kobe Shipyard & Machinery Works, Mitsubishi Heavy Industries, Ltd.;” Maintenance Activities for Alloy 600 in PWR Plants
”, Vol. 2, No.2, Aug 2010, http://www.jsm.or.jp/ejam/Vol.2.No.2/GA/13/article.html - [3]MITSUBISHI HEAVY INDUSTRIES, LTD.; “RESIDUAL STRESS IMPROVEMENT FOR NICKEL BASED ALLOY PWSCC MITIGATION BY ULTRASONIC SHOT PEENING” Vol. 1, No3, NT-11 http://www.jsm.or.jp/ejam/Vol.1.No.3/NT/11/article.html
- [4]M. TAKAMATSU, T. ASHIDA, et al., “Restoration work for obstacle and upper core structure in reactor vessel of experimental fast reactor Joyo (2)” Proceedings of International Conference on Fast Reactors and Related Fuel Cycles (FR13), March 4-7, 2013, Paris, France
Japan Society of Maintenology (ejam@jsm.or.jp)