



Classification
1 - A (Inspection),
4 - A (Repair/Replacement),
6 - A (Operation)
- Following the accident at the Fukushima First Nuclear Power Plant caused by the Great East zzJapan Earthquake and Tsunami in 2011, measures to keep the accident under control have been underway.
- Various small robots are applied to investigate inside the plant facilities, and make the conditions of the damage, temperature and radiation dose clearer.
- A robot able to perform tasks such as the removal of obstacles and decontamination those are impossible to perform for existing small robots is necessary in the near future.
- MHI introduces a remote controlled robot, the "Super Giraffe," and its expandable features, which were developed in NEDO (New Energy and Industrial Technology Development Organization) project in 2012.
- (1) Components: Nuclear plant facility
- (2) Location: Places not easily accessible to humans
- (3) Material: N/A
- (4) Condition: in the air
- (5) Condition: Nuclear disaster
- (1)[Modular design] The Super Giraffe consists of four modules (Moving / Lifting / Manipulating / Tooling), each with its own controller inside. The interface specifications can be open to the public and the function is expandable by replacing some of the modules with others.
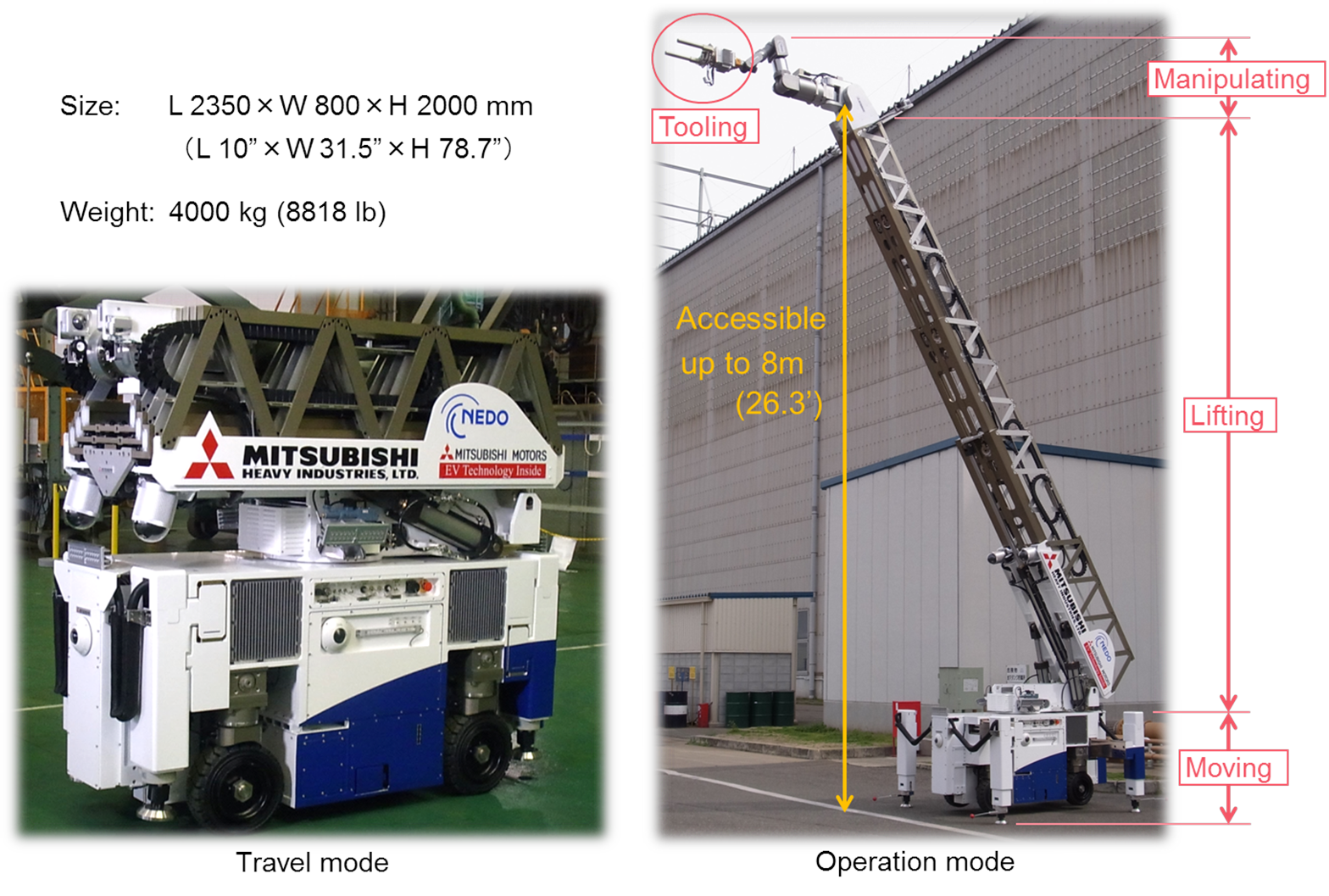
Fig. 1 “Super Giraffe” (travel mode / operation mode)
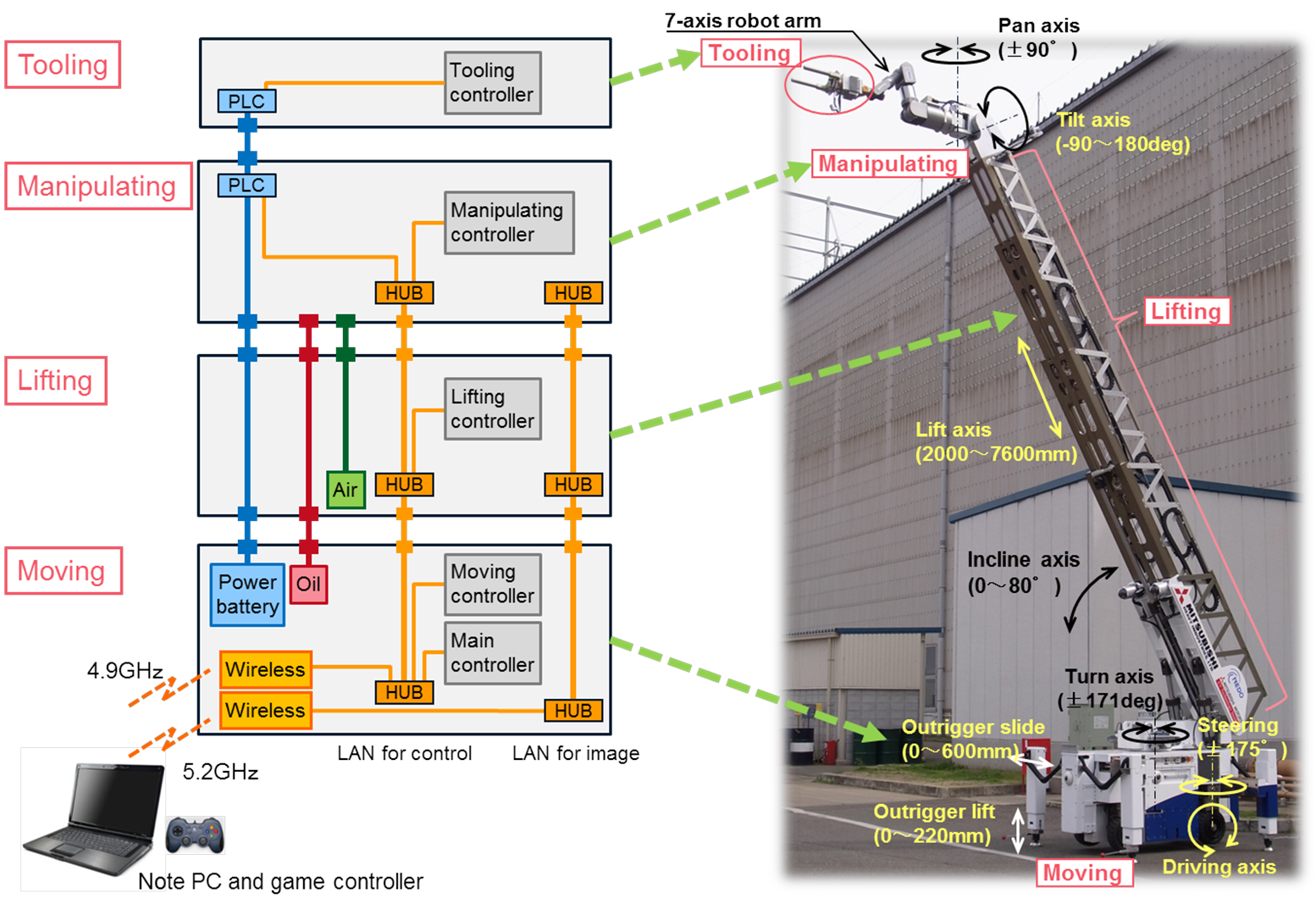
Fig. 2-1 Concept of modular design
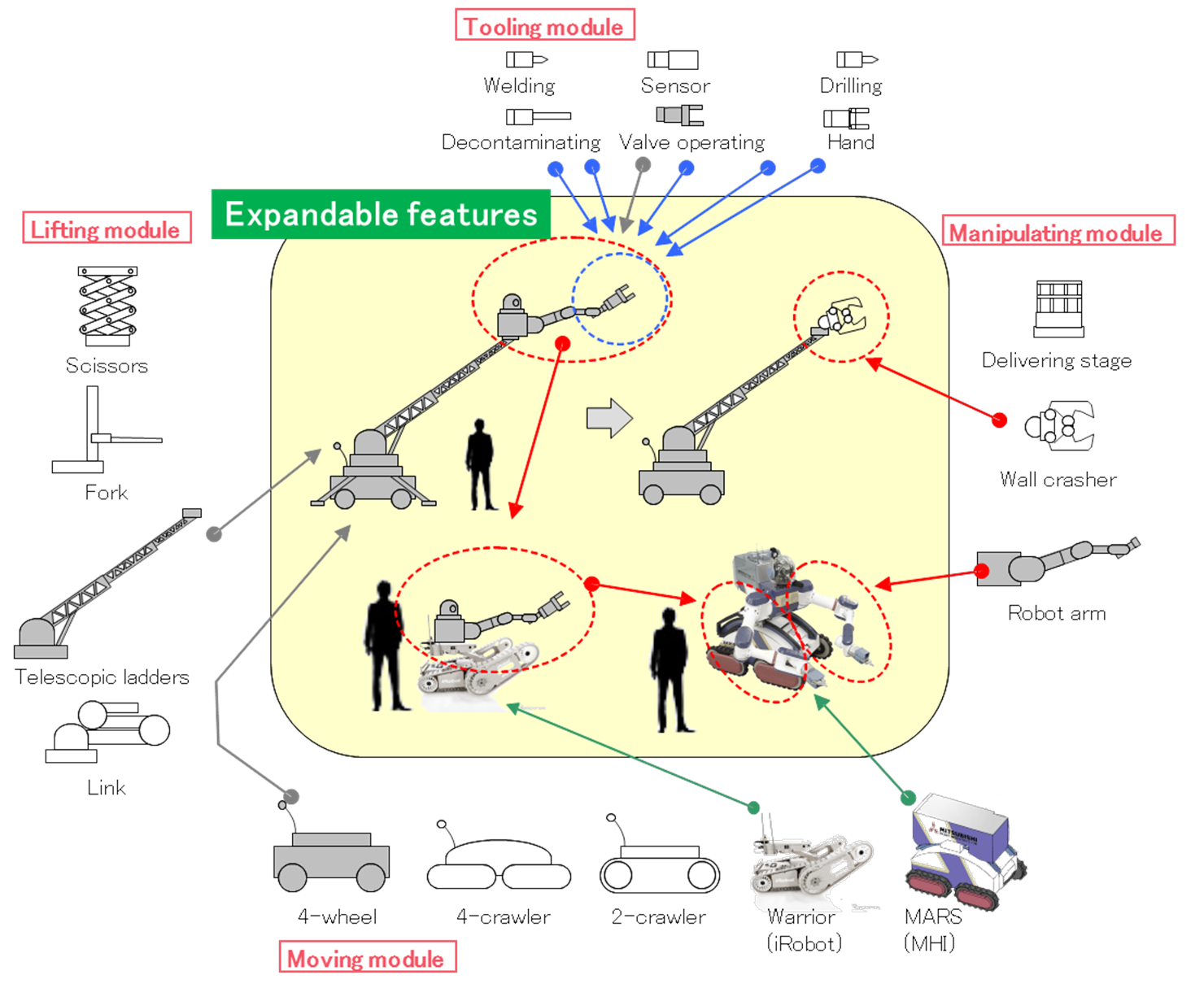
Fig. 2-2 Expandable features
- (2)[Compact design] The size of the Super Giraffe is 2530 mm (100”) long, 800 mm (31.5”) wide and 2000 mm (78.7”) high in traveling mode and weighs 4000 kg (8818 lbs.). [Fig.1][Table.1] In the operating mode, Super Giraffe can lift 150 kg (330 lbs.) of weight including the Manipulating and Tooling modules up to 8 m (26.3’) in height. The Lifting module consists of five U-shaped telescopic ladders linked with wires through pulleys and is hydraulically operated. The U-shaped telescopic ladder structure enables the Lifting module to lay down the power / signal cables and pneumatic / hydraulic hoses from the Moving module to the Manipulating module and also store the Manipulating module in it. Four outriggers with load monitoring equipped in the Moving module prevent the Super Giraffe from falling down during operation.
Table 1 Main specifications of “Super Giraffe”
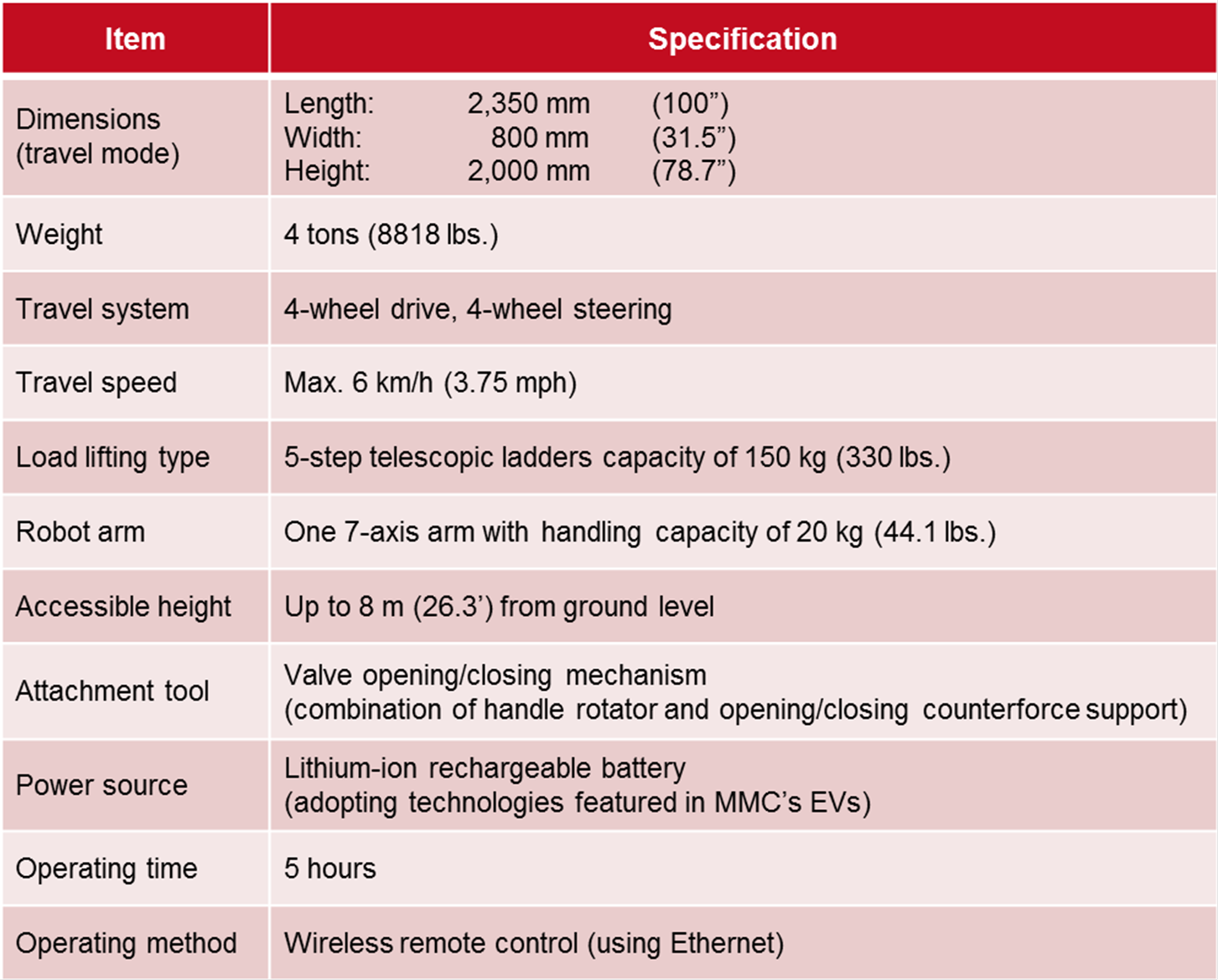
- (3)[Remote operation] The Super Giraffe is powered by Lithium-ion battery system for EV (Electric Vehicle) equipped in the Moving module and is remotely controlled by a note PC with a game controller. [Fig.2-1] Surrounding conditions can be monitored through images from built-in cameras. The Super Giraffe is also equipped with an overhead-view system. [Fig.3]
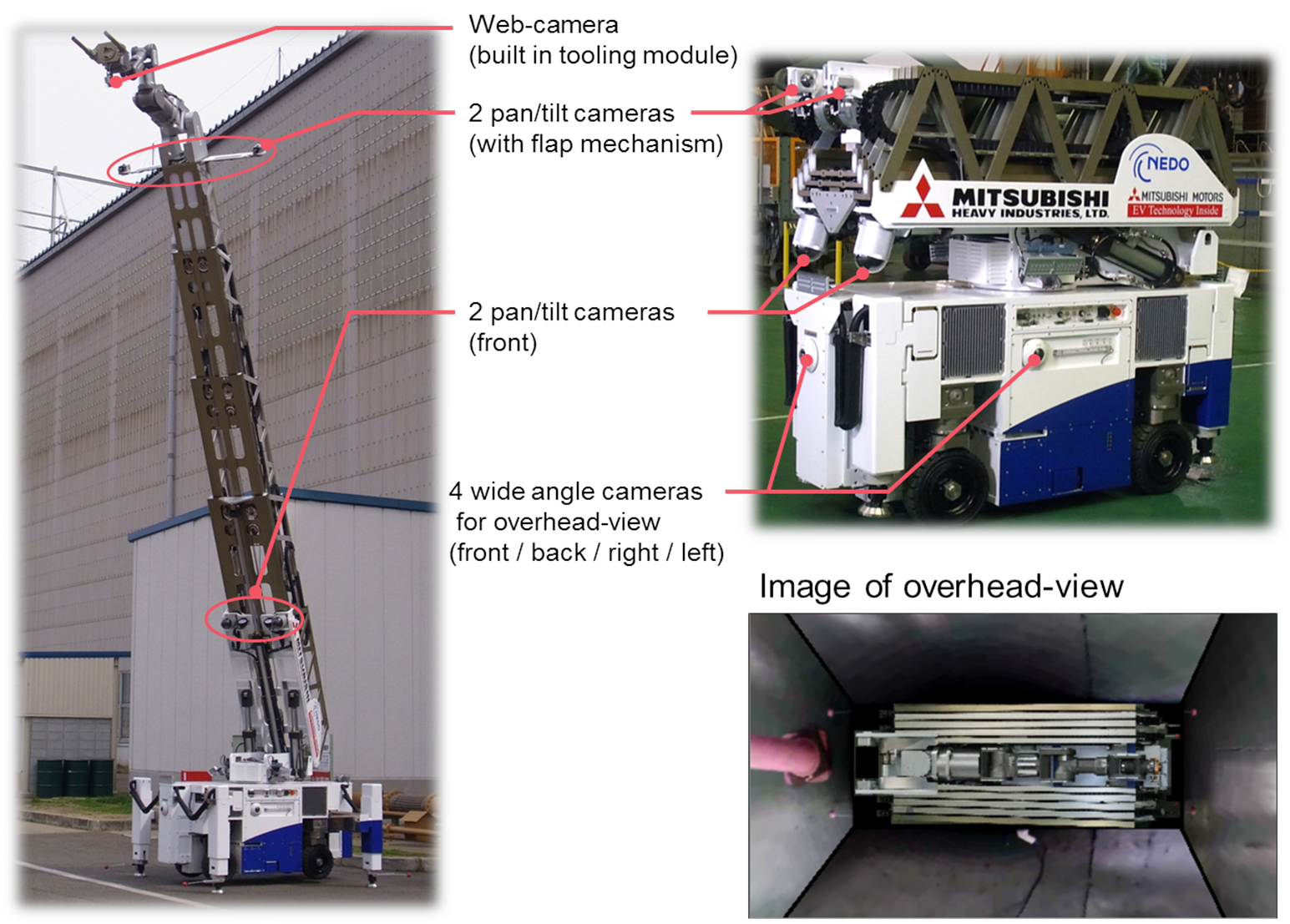
Fig.3 Built-in cameras and overhead-view system
- (4)[Flexible traveling mode]The Moving module has 4-wheel drive and 4-wheel steering. It enables not only forward/backward movement and right/left turning, but also sideways movement, diagonal movement and pivot turning. The Super Giraffe is capable of going up steps as high as 50 mm (2”) and slopes as steep as 15 degrees. [Fig.4] [Movie]

Fig.4 Flexible traveling mode
Movie
- (5)[Cable-reducing design] The Tooling module is remotely detachable from the Manipulator modules by an automatic tool changer. The PLC (Power Line Communication), applied to their power and control interface system reduces the amount of cables required and allows the cables to be built within the modules, making the manipulator module resistant to the environment. [Fig.5]
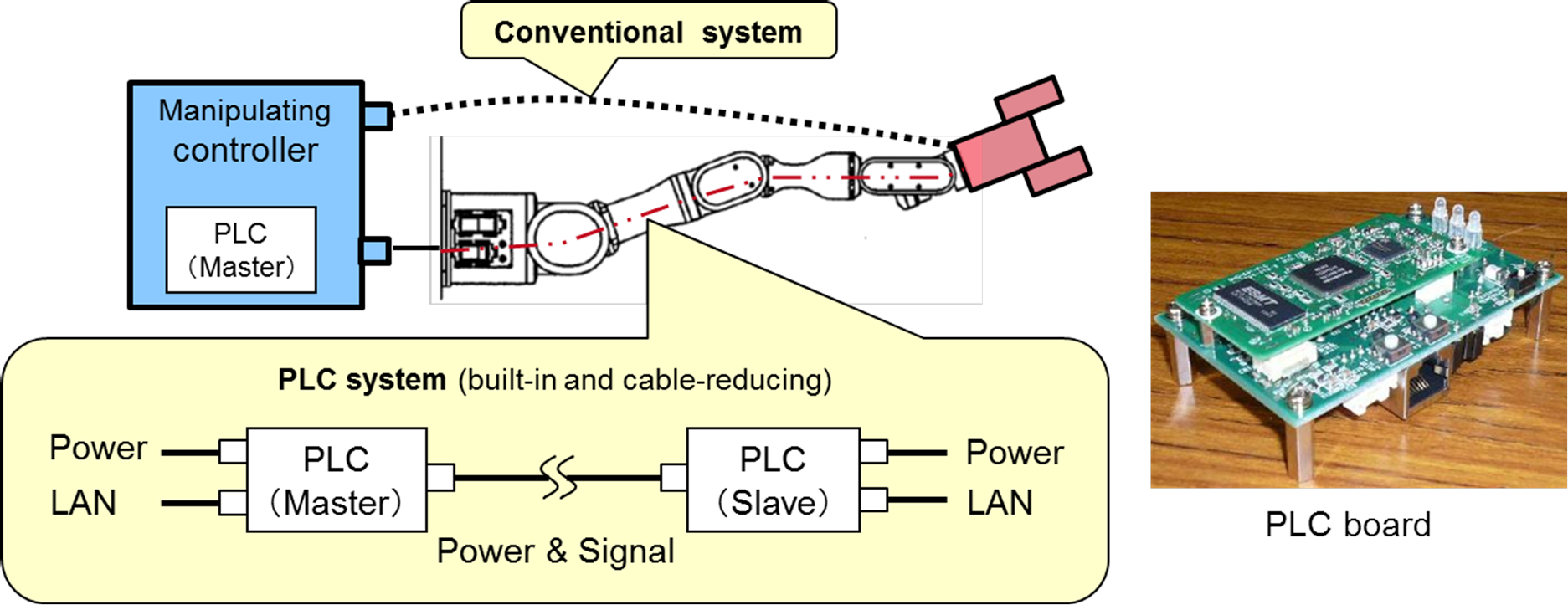
Fig.5 Cable-reducing design
- (6)[PA-25 robot arm] The PA-25 is a robot arm developed by MHI, proven in various applications for the outage of Japanese PWR nuclear plants. It has seven axes and a handling load capacity of 20 kg (44.1 lbs.) at its end and a positioning repeat accuracy of 0.5 mm (0.02”). [Fig.6] The Manipulator module is equipped with the PA-25 and an additional two axes as its base positioner. [Fig.2-1]
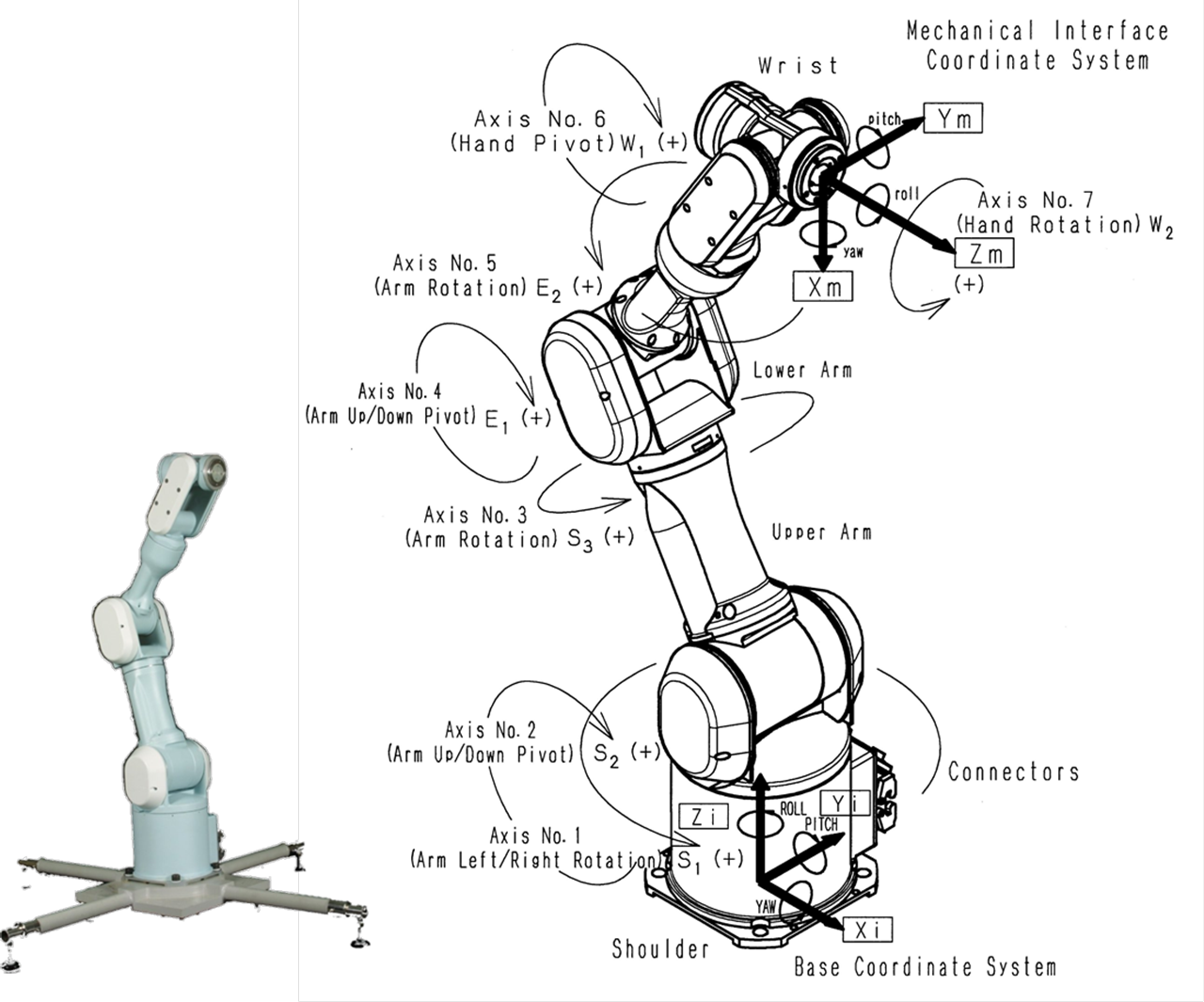
Fig.6 PA-25 robot arm
- (7)[Expandable tooling module] MHI developed a valve operating tooling module for the NEDO project. Other tooling modules such as sampling, decontaminating, cutting, welding, ECT/UT inspection, and buffing had been priorly developed and gave satisfactory results. [Fig.7]
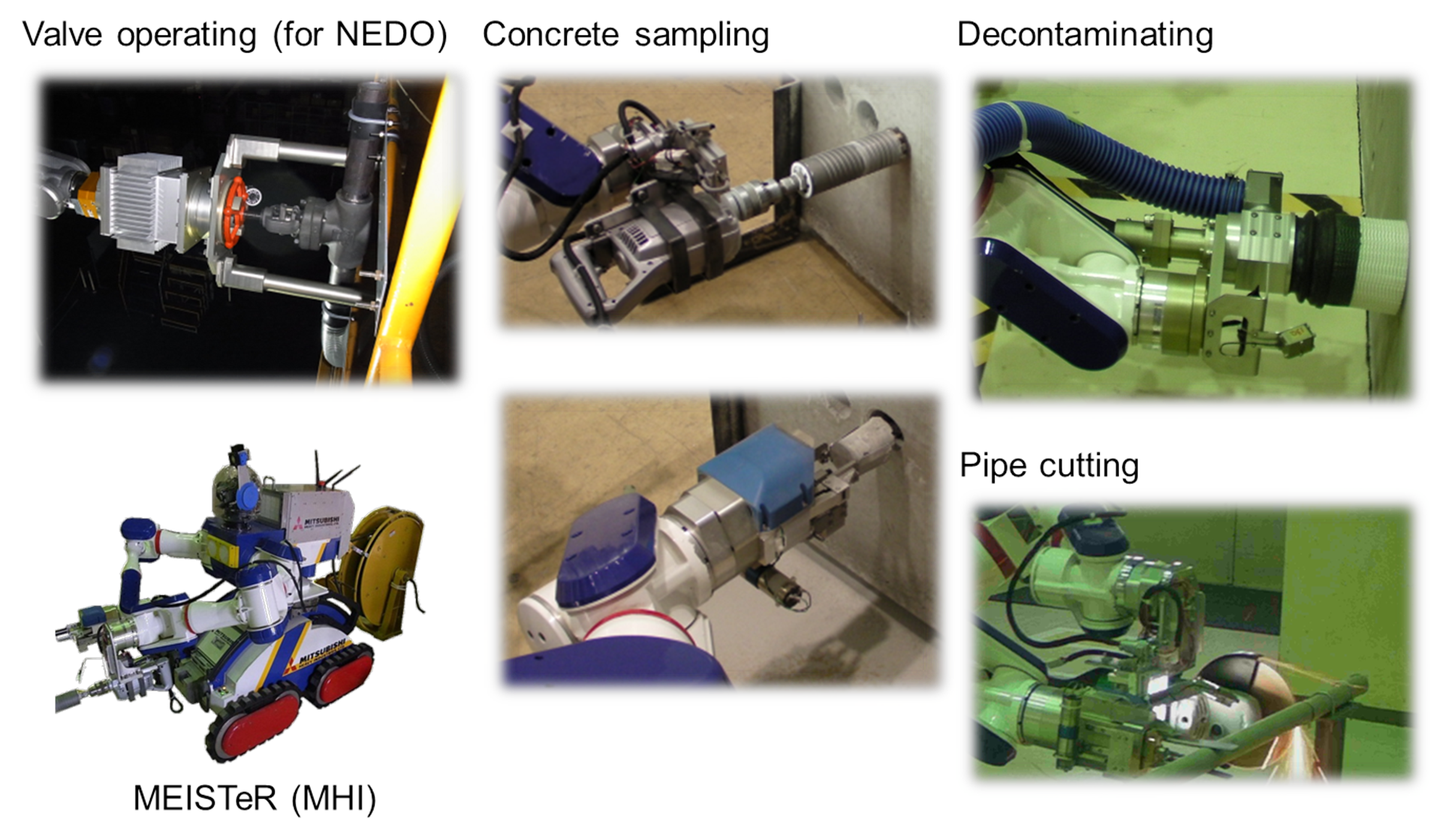
Fig.7 PA-25 robot arm
- (8)[Others] MHI can provide not only the above separated module for your robot system, but also support you to develop special systems on demands. If you have any requests, please contact us. (Section 7)
The Super Giraffe is not applied to the actual plant yet, but can be applied to the following tasks.
- Valve operation at high places
- Investigation of high places
- Cutting of obstacles such as handrails
- Decontamination of floors and/or walls
- Sampling of radioactive floors and/or walls
- Delivering a small robot to high places
By applying the manipulator developed by MHI to maintenance work, reduction of radiation exposure, process reduction, and work range expansion were attained. Those further improvements are aimed at by performing the following development from now on.
- Improvement for the autonomy and operability
The latest control technology and sensing technology will be incorporated into the robots to improve the autonomy and operability and thereby reduce field workers’ loads. - Installation of the mechanism for moving.
The moving mechanism will be installed in the robot to reduce some work processes for preparation and installation of the robot by field workers.
Japan Society of Maintenology (ejam@jsm.or.jp)