





Classification
1 - B : Inspection,
4 - B : Repair/Replacement
Fukushima Daiichi Nuclear Power Plant (hereafter refers to as 1F) was seriously damaged by the tsunami caused by the Great East Japan Earthquake, and the subsequent hydrogen explosions that occurred in the Reactor Building (hereafter refers to as R/B) of Units 1, 3 and 4. To start the restoration work for 1F, robots to work on behalf of personnel working in the severe environment with high radiation have been demanded.
Toshiba had developed Gamma Cameras which measure gamma levels through the captured images before the disaster, but there were no remote controlled robots to carry these Gamma Cameras into the R/B to find out the condition inside and outside of R/B. Toshiba quickly prepared an remote-controlled crawler-type vehicle in just 3 weeks, and it was used 3 times for the investigation in R/B of 1F Unit1 (hereafter refers to as 1F-1) in May of 2011.
In 1F-3, a large-scaled pumper truck was equipped with underwater cameras and remote control devise to investigate the condition in Spent Fuel Pool (hereafter refers to as SFP) and to take samples of the pool water, and Remotely Wireless-Controlled System was established with installing the signal transceivers around R/B.
Various crawler type robots which were brought to the site were sufficiently useful to investigate the condition inside of the R/B. However they were not suitable for the investigation of Primary Containment Vessel (hereafter refers to as PCV) and reactor pressure vessel due to their sizes and their limited functions. It was required to develop a compact-sized and remote controlled robot which is able to compensate with other devices to have more functionalities.
Quadruped Robot was specially developed for this project to satisfy the unique demands to work in many different purposes towards the final reactor decommissioning. Refer to the followings for the details. [1] [2]
- (1) Components: human-inaccessible components in the reactor building, turbine building etc.
- (2) Location:
Not Applicable
- (3) Material: Not Applicable
- (4) Condition: In the air, and under high radiation environment
- ●Walk with 4 legs which have high adaptability to uneven terrain floor
- ●Carry heavy objects while keeping its balance on uneven floor
- ●Contribute to various restoration work by adding optional equipment (such as a Vehicle and a Handling Arm)
- ●Move not only forward, backward, to right and to left, but also diagonal to be able to access the hard-to-reach area in narrow apace
- ●Is operated easily with joy pad
<specification>
● Weight : 65kg
● Size : 624mm(L)×587mm(W)×1066mm(H)
● Power Source : Battery
● Battery Life : 2 hours (continuous use)
● Weight Capacity : 20kg
● Walking Speed : 1km/h
● Control : Wireless
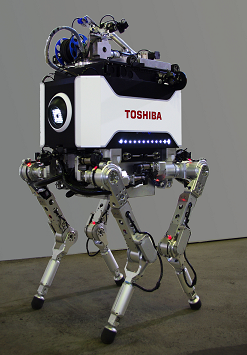
Fig.1 Quadruped Robot
5. Examples of Application
Walk Patterns
This robot has two walking step patterns; the crawl mode and the trot mode. In case that the stability is preferable to moving speed, for example walking on the difficult terrain, the crawl mode is more suitable. On the contrary, in case that the moving speed is, for example walking on the flat area, the trot mode is more suitable.
[ Crawl mode ]

[ Trot mode ]
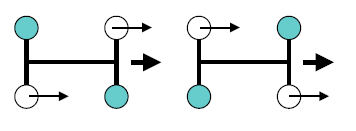
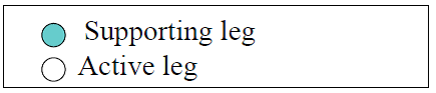
Fig.2 Walk Patterns
Walk on Stairs
When a robot walks on uneven surfaces such as stairs, the robot carefully walks by crawl mode which is a conservative walking method, and uses one of four legs to move forward by taking a step while keeping its center of gravity with other three legs to ensure stability.
As shown in Fig.3, the robot shifts its center of gravity while balancing its weight with one front leg and two back legs to with two front legs and one back leg prior to step forward by kicking up the back left leg. The robot is designed to maintain its stable position by keeping its center of gravity within the polygon made at its leg positions, as shown in yellow triangle.
Fig.3 Balance Control
Leakage Investigation of 1F-2
It was discussed by the project team for PCV Leakage Investigation and Repair that the vent pipe bellows are suspicious to cause the PCV bottom leakage (Refer to Fig.4), and leakage from the respective 8 vent pipes were visually inspected.
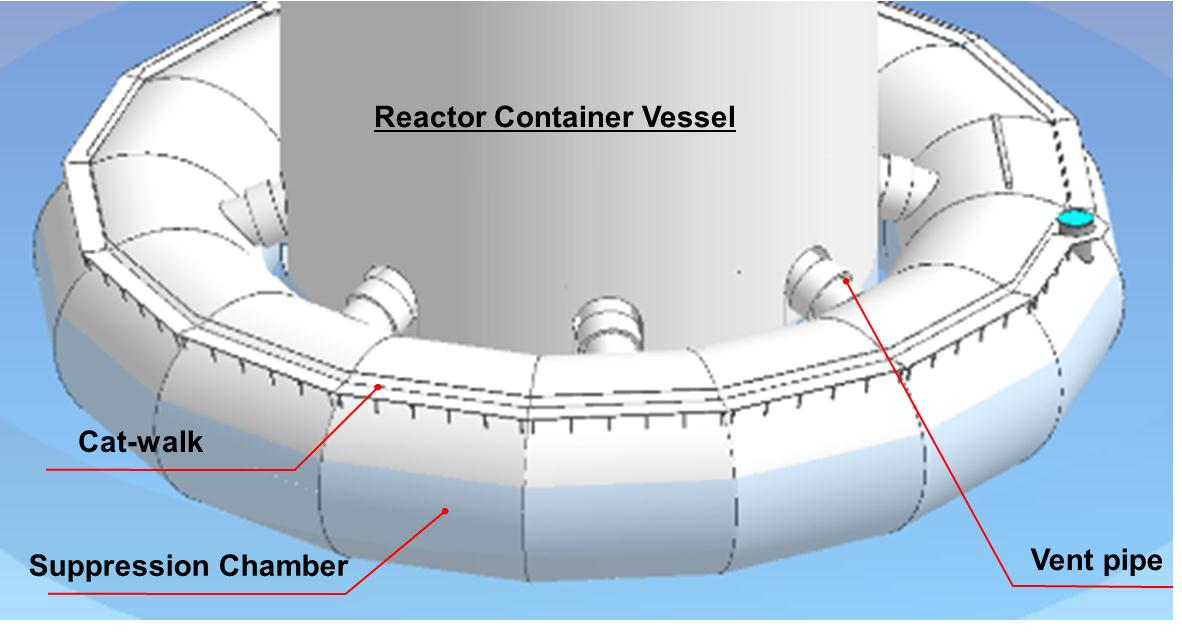
Fig.4 Position of bent pipe at torus room
As shown in Fig.5, the robot entered the door, and took stairs while holding the balance and carrying a compact flat vehicle which is less than 50mm in thickness with a camera. This portable device has four wheel drives and is cabled to quadruped walking robot to be controlled. After walking along the catwalk to the destination, it released the flat vehicle which is remote-controlled to go across, around, and under other equipment on the suppression chamber. Investigation was performed several times, and each investigation took 2 to 3.5 hours per 1 to 2 vent pipes. Investigation of all 8 vent pipes was finished on March 15, 2013 and as a result, no water leakage was found such as on lower part of the vent pipes, on the edge of the vent pipe sleeves, on the edge of the sand cushion drain pipes, and on lower part of the vent pipes bellows cover as shown in Fig.7. [3] [4]
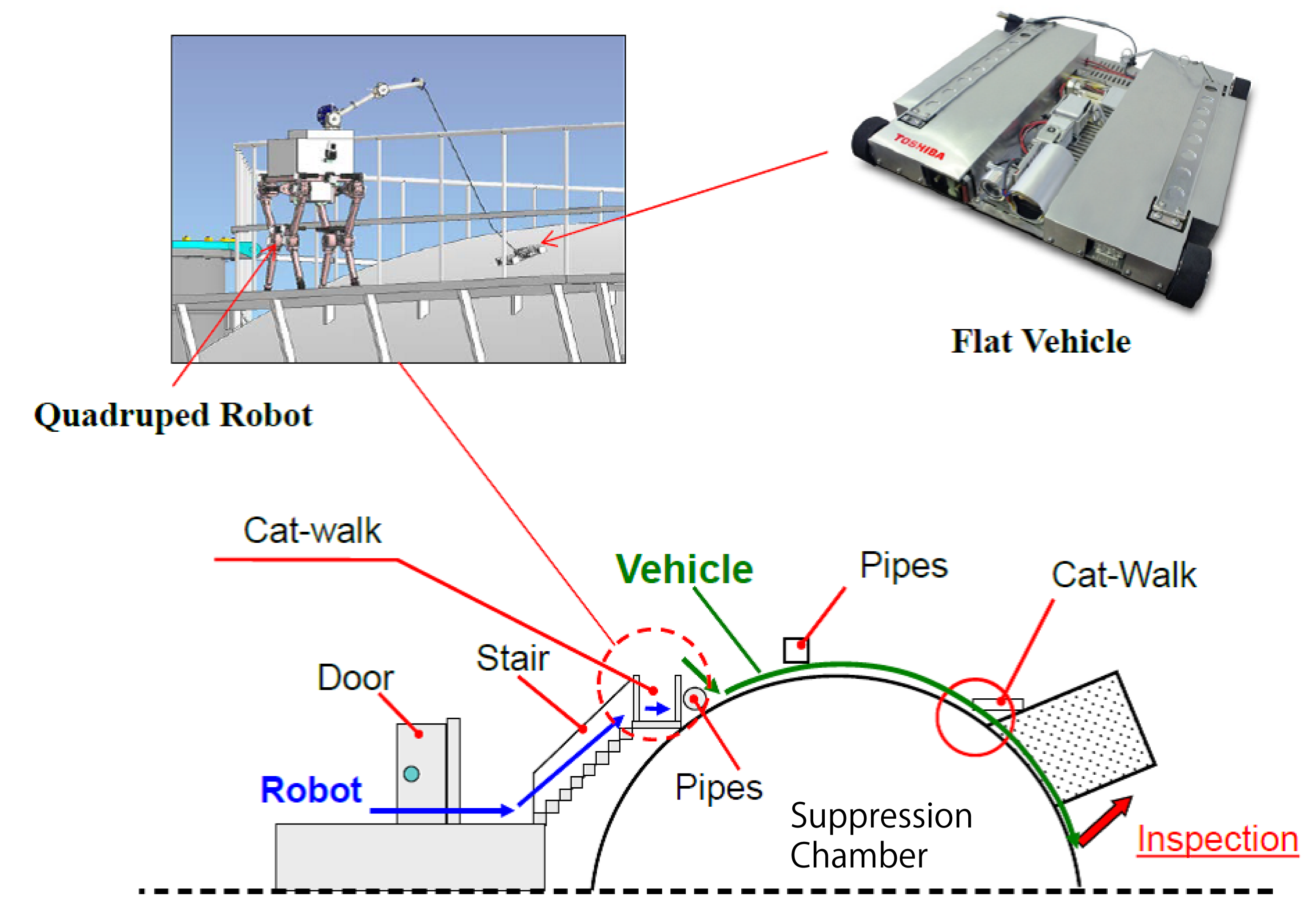
Fig.5 Access route for vent pipe inspection
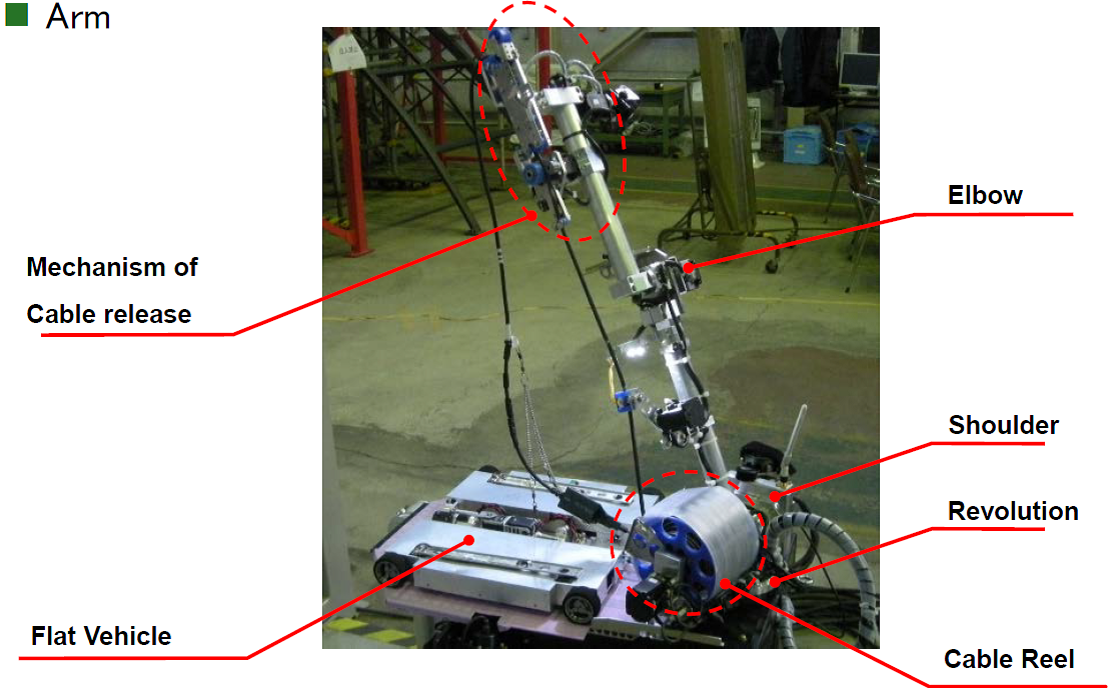
Fig.6 Flat vehicle and handling arm
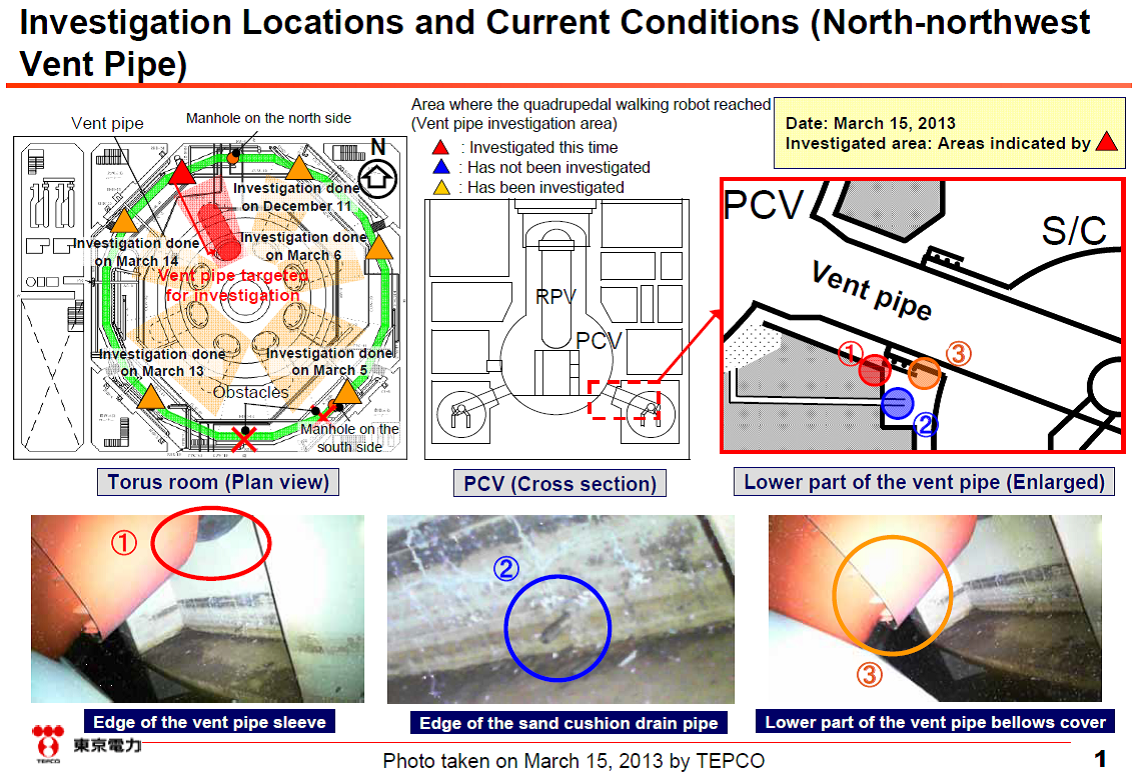
Fig.7 Investigation Results
6. Reference
- [1]http://photo.tepco.co.jp/en/date/2012/201212-e/121211-01e.html
- [2]上原, 菅沼, 他,“災害現場向け遠隔作業ロボットの開発”, 日本原子力学会2012年秋の大会予稿集, N07-N08,2012.
- [3]http://photo.tepco.co.jp/en/date/2013/201303-e/130315-01e.html
- [4]上原, 菅沼 他,“災害現場向け遠隔作業ロボットの開発;原子炉建屋内調査への4足歩行ロボットの適用(第2報)”, 日本原子力学会2012年秋の大会予稿集, I12, 2013.
Japan Society of Maintenology (ejam@jsm.or.jp)