




Hitachi-GE Nuclear Energy, Ltd.
Hitachi, Ltd.
Vol. 11, No. 1, NT93
Manipulator Pose Estimation System Using Stereo Camera for Decommissioning Work
KEYWORDS:
Remote control system, Sensor-less manipulator, Decommissioning
1. Technical summary
Classification
7 - C Dismantling/Decontamination
Various types of remote control robots are used for decommissioning of nuclear power plants [1][2][3]. Because manipulator type robots are able to conduct some works in place of human workers at high radiation environment, they are useful for implementing each work step, including decontamination, removal of structures, and so on. These robots are required to have radiation tolerance and enough payloads to allow their application to heavy work in high radiation environments. If the robots have on-board sensors and electrical circuits, they are damaged by radiation effects and should be replaced the new ones before a failure. Therefore, a shield is needed to add the sensors. However, it is difficult to add the shield because of the payload limitation. If these sensors are removed from the robots, it is difficult to control the robots and monitor the current conditions. In order to overcome the issue, a remote control system for a sensor-less manipulator has been developed.
Generally, remote control manipulators have a rotation sensor in each joint to monitor and control their poses [4]. A potentiometer, an optical encoder and a resolver may be used as the rotation sensor. However, these sensors are damaged in high radiation environments. Therefore, in our proposed remote control system, the internal sensors are removed from the manipulator and the current conditions are estimated using only external sensor data and robot control commands. Fig. 1 shows the concept of the remote control system for a sensor-less manipulator. The manipulator in working area is connected to a manipulator control unit in operation area by an umbilical cable. Stereo cameras are set around the manipulator as external sensors. The stereo cameras signal is sent to a processing unit in operation area. The manipulator poses are estimated from camera images obtained by the cameras. The estimated poses are displayed in a monitor, and an operator can control the manipulator in real-time. Details of the pose estimation method are described in Section 4.
This paper describes the proposed manipulator pose estimation system, the remote control system and results of a fundamental experiment using the sensor-less manipulator.
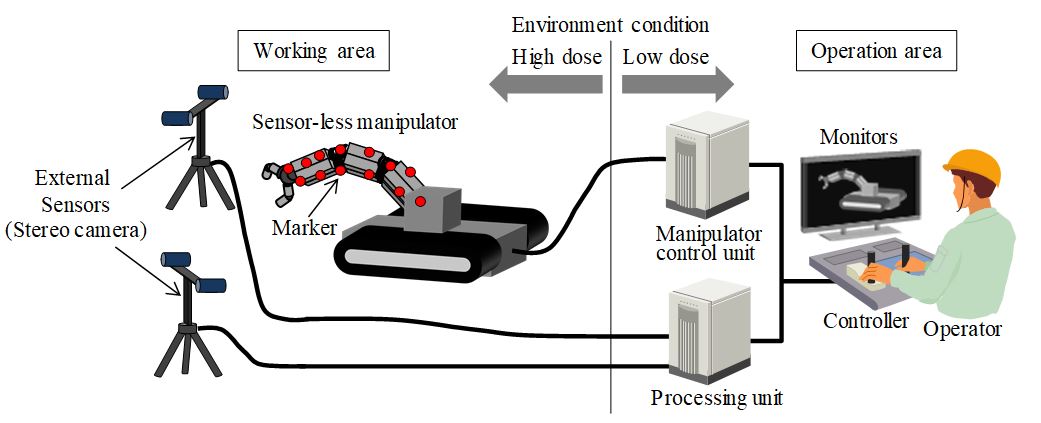
Figure 1 Concept of the remote control system for a sensor-less manipulator
2. Development Phase
3. Scope
- (1) Components:
Plant, Remote control equipment
- (2) Location:
Radiation environments
- (3) Materials:
N/A
- (4) Condition:
N/A
4. Features
A stereo camera vision system is utilized for the external sensors. The system detects three-dimensional (3-D) positions of markers which are attached on every link of the manipulator. By using the detected 3-D positions, the manipulator poses are estimated based on its kinematic model.
Details of the proposed manipulator pose estimation system are shown in Fig. 2. The pose estimation system consists of the marker detection part (the marker detectors) and the pose estimation part (the pose estimator). In the marker detection part, 3-D positions of markers are calculated from camera images obtained by the stereo cameras 1 to N. Considering that marker occlusion occurs during manipulator operation, the manipulator poses are estimated using a particle filter that is a type of state estimation filter [5]. The particle filter is a stochastic state estimator that expresses the probability density of the states by a set of particles (in this case, the candidate manipulator poses).
The pose estimation procedure has two phases: a prediction phase and an update phase. In the prediction phase, the manipulator poses are predicted from the arm motion model, and each marker position is calculated in each pose. Considering the pose has some measurement error, the error represented by a Gaussian distribution is added to the predicted pose. In the update phase, the states are updated from the results of marker observation. The distances between the predicted marker positions and the observed ones are calculated for each pose. The likelihood of each pose is calculated based on the distances, and the manipulator pose is determined from the states calculated in the update phase.
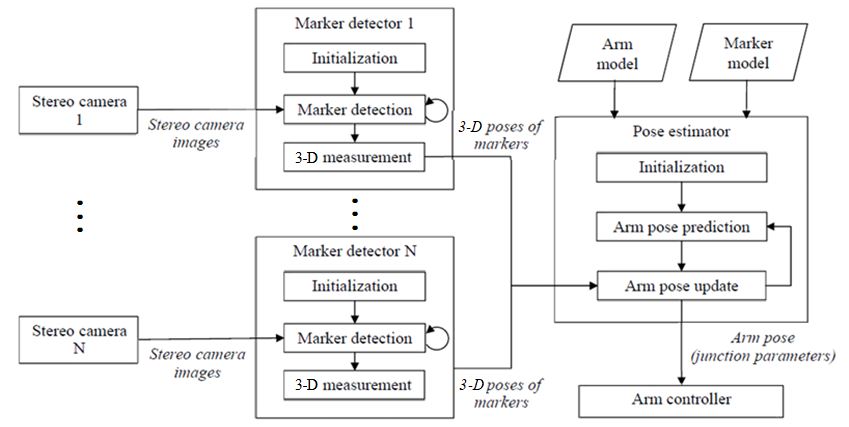
Figure 2 Block diagram of the manipulator pose estimation system
5. Example of Application
An experiment was carried out to evaluate the fundamental performance of the proposed systems. Fig. 3 shows a photo and a schematic configuration of the sensor-less manipulator used in the experiment. The manipulator has five rotation joints and one bending joint. Each joint is driven by hydraulic actuators.
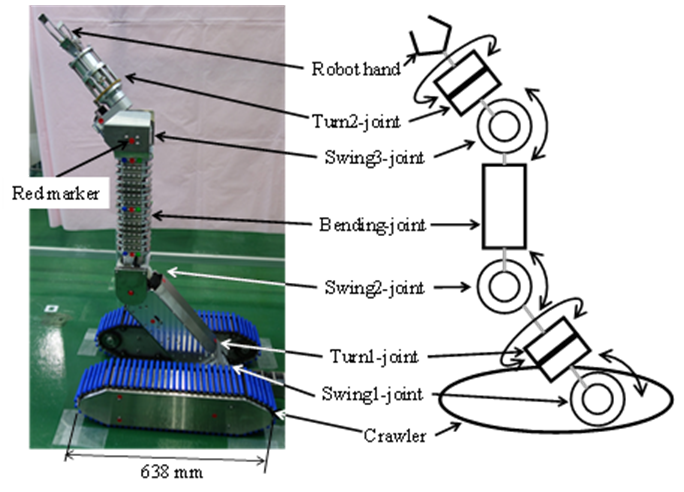
Figure 3 Configuration of sensor-less manipulator used in the experiment
The control block diagram of the manipulator with hydraulic actuators is shown in Fig. 4. The references of the manipulator end effector positions are input by an operator and converted to the references of each joint angle by using the inverse kinematics model. The references of the hydraulic control variable are calculated by inputting the references of each joint angle and the estimated current ones into the hydraulic control model.
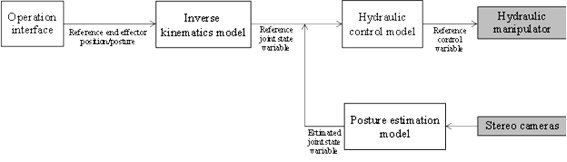
Figure 4 Control block diagram of the manipulator with hydraulic actuators
In the experiment, the manipulator with attached red markers was set between two stereo cameras. An operator controlled the manipulator while seeing a monitor on which the current poses were presented in the virtual environment. Experimental setup while operation is shown in Fig. 5. Two stereo cameras were set in 1500mm from the manipulator. The distance between the camera and the manipulator was decided considering the camera resolution and the marker size.
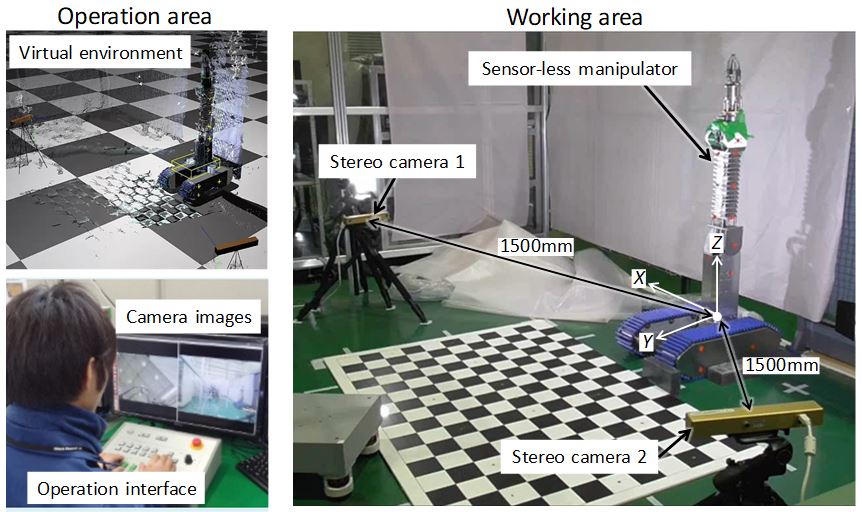
Figure 5 Experimental setup
As a result of the experiment, we confirmed that the manipulator at the working area was controlled by an operator while seeing the manipulator poses displayed in virtual environment. Fig. 6 shows an example of stereo camera images and the pose estimation result. 3-D positions of each marker were measured as shown in the left-side part of Fig. 6, and estimated manipulator pose shown in right-side part of Fig. 6 was same as the real one. It was also confirmed that the manipulator pose was estimated in real-time. The estimation error was approximately less than 2.0deg on average, comparing the real rotation angle measured by a potentiometer with the estimated pose.
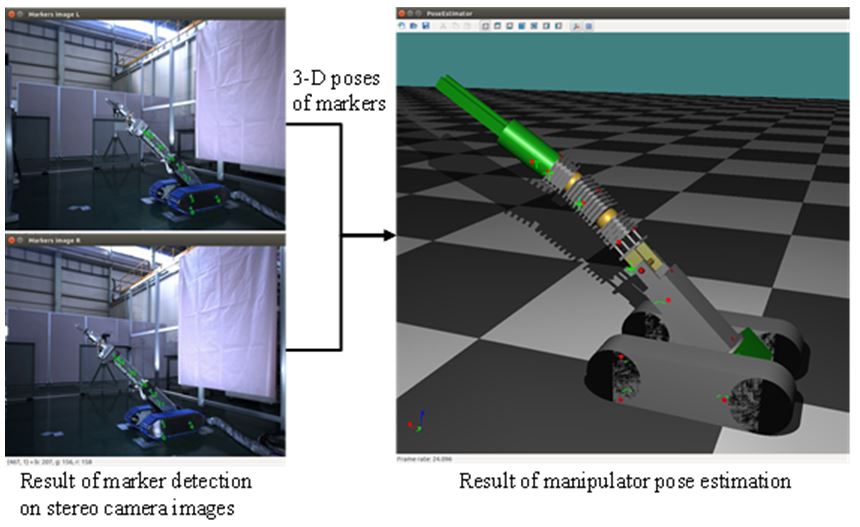
Figure 6 Example of stereo camera images and the pose estimation result
Next step, we will incorporate the systems into working robots for the decommissioning and carry out the performance evaluation.
6. Reference
- 1. Hitachi, Ltd., “Submersible crawling swimming and shape-changing robots for inspection prior to removal of fuel at Fukushima Daiichi Nuclear Plant – Changing shape and posture to avoid obstacle in narrow space --”, http://www.hitachi.com/New/cnews/month/2014/03/140310e.html, Press Release, posted on March 10, 2014.
- 2. H. Mori et al., “Development of remotely operated robots for decommissioning of nuclear power plants; (1) Development of leakage survey vehicle in torus room”, 2014 Annual Meeting of the Atomic Energy Society of Japan, p.401, 2014.
- 3. S. Okada et al., “Development of remotely operated robots for decommissioning of nuclear power plants; (3) Development of shape changing robot for inner of PCV survey”, 2014 Annual Meeting of the Atomic Energy Society of Japan, p.403, 2014.
- 4. NEA OECD, “Remote handling techniques in decommissioning”, A Report of the NEA Co-operative Programme on Decommissioning (CPD) Project, 2011.
- 5. S. Thrun et al., Probabilistic Robotics. The MIT Press, 2005.
7. Contact
Japan Society of Maintenology (ejam@jsm.or.jp)