



Classification
7 - C
Presently, robots are deployed in the Fukushima Daiichi Nuclear Power Station for the implementation of survey, measurement and so forth in a high radiation environment within the buildings by remote control. Additionally, in the future it is anticipated that there will be an increasing needs for the robots to be used for the removal of rubbles, installation of shielding and so forth. Furthermore, it is deemed necessary to prepare the robots for the decontamination work required to improve the environment within the buildings, and to apply the robots to the subsequent survey and repair works for primary containment vessels. To respond to such needs for the application of remote-controlled robots, development works have been in progress. This paper provides an introduction to the High-pressure Water Jet Decontamination Apparatus for Upper Part of 1st Floor of Reactor Buildings.
The apparatus consists of a main body and a sub-system. The main body consists of three modules: a nozzle head which has a high-pressure water jet nozzle, a hydraulic telescopic mast which lifts the nozzle head and a crawler vehicle which carries them. The crawler vehicle has four outriggers for keeping the main body steady during jetting out high-pressure water and four flippers for controlling swing in the pitch direction during getting over a bump or a slope. The crawler vehicle also has eleven cameras for monitoring its surroundings and a suction head which collects flowed-down contaminated water. The sub-system consists of a high-pressure water system, a collecting system, a reel, a control panel and control units. The system configuration, the photograph and the specification of the apparatus are shown in Figure1, Figure2 and Table1 respectively.
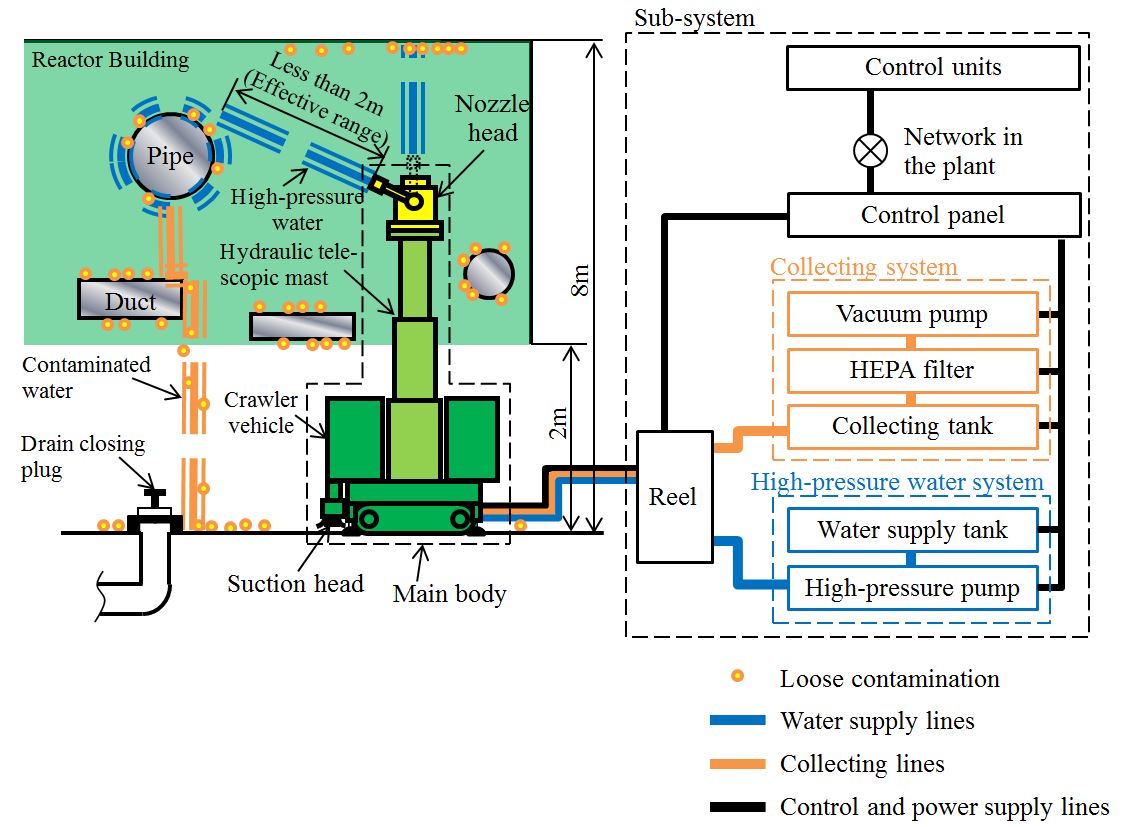
Figure 1 The system configuration of High-pressure Water Jet Decontamination Apparatus
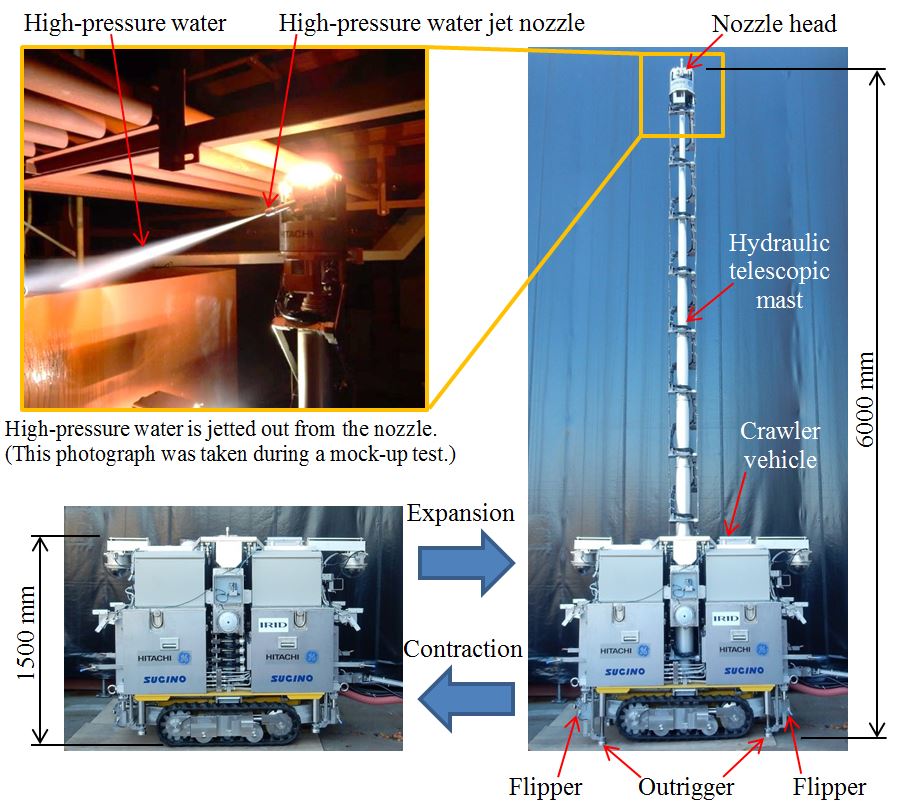
Figure 2 The photograph of the main body
Table 1 The specification of High-pressure Water Jet Decontamination Apparatus
Weight of the main body |
Approx. 1,300 kg |
Dimensions of the main body |
Approx. 2,100 mm * 700 mm * 1,500 mm |
Decontamination method |
High-pressure water jet |
Decontamination objects |
Pipes, ducts, cable trays, control panels, walls and ceilings from 2 m up to 8 m in height |
Target contamination type |
Loose contamination on surfaces |
Moving method |
Motor-driven crawlers |
Moving speed |
Max. 1 km/h on flat floor |
Moving performance |
Capable to get over a bump up to 70 mm in height |
Capable to get over a slope up to 15 degree angle |
|
Stroke of the hydraulic telescopic mast |
0 - 4,500 mm |
Tilt range of the nozzle rotation |
0 - 120 degrees |
Pressure range of the high-pressure pump |
10 - 100 MPa |
- (1) Components: Reactor building
- (2) Location:
Disaster site
- (3) Materials: N/A
- (4) Condition: N/A
- ·High-pressure water jet decontamination
- The apparatus was developed for the purpose of being used to remotely clean up loose contamination on surfaces of structures from 2 meters up to 8 meters in height in the 1st floor of the reactor buildings.(*) High-pressure water is jetted out from the high-pressure water jet nozzle to surfaces of decontamination objects. Flowed-down contaminated water is kept back around a floor drain by a drain closing plug and collected through the suction head.
- ·Emergency rescue
- When the main body is broken down in a reactor building, it can be rescued by the following steps. The diagram of emergency rescue procedure is shown in Figure3.
- >Opening a valve to release driving water and lowering the hydraulic telescopic mast to prevent interference with upper part structure on rescue paths.
- >Opening valves to release driving water and raising the outriggers or the flippers to make the crawlers contact with a floor.
- >Supplying compressed air and letting the crawlers’ clutches out in the case of not rotating the crawlers by failure of motors or control instruments.
- >Moving the main body to the truck bay door of the reactor building by normal operation or a motor-driven winch.
-
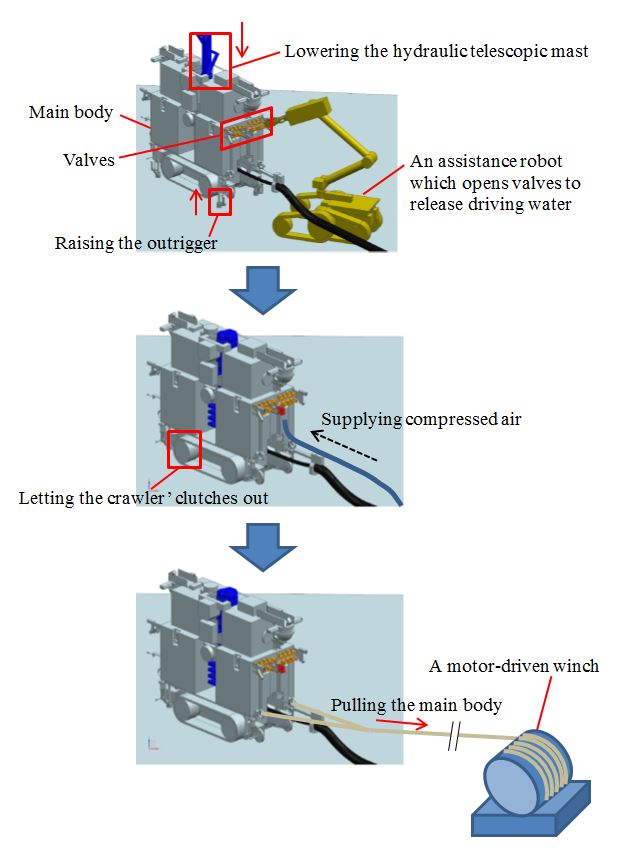
Figure 3 The diagram of emergency rescue procedure
* High-pressure water decontamination apparatus “Arounder” was developed for the purpose of being used to remotely decontaminate floor surfaces and lower wall surfaces up to 2 meters in height of the 1st floor of reactor buildings.
movie aprox. 4min.30sec.
5. Examples of Application
- The High-pressure Water Jet Decontamination Apparatus for Upper Part was developed. Verification tests were conducted by using a mock-up in which upper parts of the 1st floor in the reactor buildings were simulated. The results of the tests showed that the apparatus would be applicable in actual use.
6. Reference
- [1] Kazuya Shimizu et al, “Development of Remote Decontamination Techniques for Reactor Building (1) Validation test of High-pressure Water Jet Decontamination Equipment for Upper Part of 1st Floor”, 2015 Fall Meeting of Atomic Energy Society of Japan
- [2] International Research Institute for Nuclear Decommissioning, “IRID Annual Research Report 2015”, p.4
- [3] Hitachi-GE Nuclear Energy, Ltd. E-JAM Vol.6, No.4, NT-68 “High-pressure water decontamination apparatus “Arounder””
7. Acknowledgment
This project was undertaken by Hitachi-GE Nuclear Energy, Ltd. as a member of the International Research Institute for Nuclear Decommissioning which is entrusted with financial sponsorship from the Japanese Ministry of Economy, Trade and Industry.
Japan Society of Maintenology (ejam@jsm.or.jp)