


Classification
7 - C
In the damaged Fukushima daiichi nuclear power stations, dose equivalent rates inside the reactor buildings are quite high. Workers in the reactor buildings cannot work for long hours. Therefore decommissioning the stations is quite important to improve the hazardous environment inside the buildings. The International Research Institute for Nuclear Decommissioning (IRID) and Tokyo Electric Power Company (TEPCO) keep making contribution to the development of decontamination equipment for the purpose of the reduction of the dose equivalent rates to make possible for workers in the reactor buildings to work for long hours. [1]
This paper introduces the decontamination equipment developed by MHI under IRID project, as shown in Fig.1.

Fig.1 Super Giraffe
A tele operated robot named MHI-MEISTeR (as shown in Fig.2) had been successfully applied to the Fukushima daiichi for decontamination processes in lower position. It was operated for the vacuuming / blasting decontamination, concrete core sampling, and the gathering the rubble in the reactor buildings. The blasting system in low position with MHI-MEISTeR was developed as blasting decontamination equipment in order to make workers in reactor buildings possible to perform decontamination in lower position up to 2m. The equipment was applied to the decontamination work and removal of rubbles. [2]

Fig.2 Blasting equipment in low position
On the other hand, implementation of the survey revealed that the high dose equivalent rate were mainly (approximately 70%) contributed by the structures and ducts, in high position, which are contaminated by radioactive materials. It may be essential to reduce the dose equivalent rates in high position in order to improve the environment in the reactor buildings.
So MHI launched a project to develop the blasting system for decontamination in high position. The blasting system is consists of two equipment. One is a robot for high position work called Super Giraffe which is developed for multi purpose activity in high position and the other is vacuuming/blasting equipment which is developed for low position previously.
The blasting system is designed for disposal radioactive materials penetrating in concrete of the buildings by physical processing. It is capable of vacuuming contaminations on structures in high position, for example concrete wall surface, ceiling and duct in high position. Super Giraffe is equipped a nozzle for blasting process at the end of manipulating tool, and 4-step telescopic ladders to reach the level of 8m, and it is equipped a 7-axis arm to be able to operate precisely in narrow space. [3] [4]
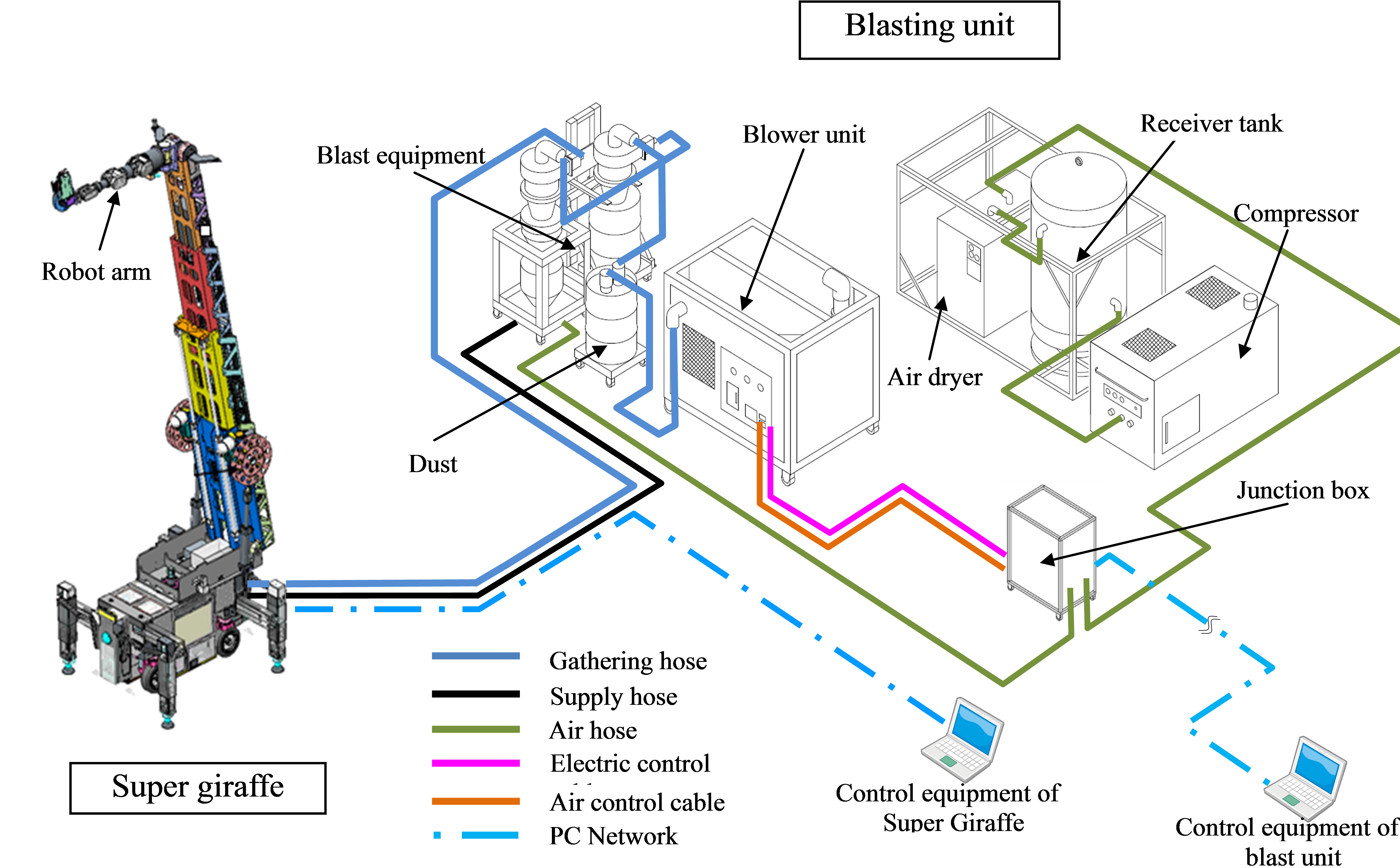
Fig.3 Blasting equipment in high position
Table.1. Specification of Blasting equipment in high position
| Item | Specification | |
|---|---|---|
| Super Giraffe | Dimension, weight | W1330×L2530×H1800 [mm],4 [ton] |
| Moving system | Four wheel drive/steering | |
| Moving performance | Step 50 [mm],Incline 15 [degree],Speed 6 [km/h] | |
| Performance | Forward/back left turning/right turning, multidirectional movement/ pivot turning | |
| Load lifting | 4-step telescopic ladders capability of 150 [kgf] | |
| Robot arm | 7-axis control ,handling load capacity of 25 [kg], Positioning repeat accuracy 0.5 [mm] |
|
| Accessible height | Up to 8[m] | |
| Control | Note PC+handy operation device (Either wired or wireless) |
|
| Battery | Lithium-ion battery system for EV(Operating time 5 hour ) | |
| Safety | Four outriggers with load monitoring Interlock |
|
| Blasting Unit | Organization | Tool head Blast supply unit , Blower unit , Control unit Air compressor unit(Pressure : 0.7Mpa) |
| Blasting Material | Material: Steel grid Density: 7.4[g/cm3]* Firmness:Hv450~920* |
|
Demonstration test is essential before using developed equipment. In order to improve the equipment, demonstration test is generally conducted in the actual plant. However, once the equipment is used in the Fukushima Daiichi reactor buildings, it will be contaminated with radioactive materials. Then, it will be difficult to treat to modify the used equipment based on the result of the demonstration test in shop. Therefore, the demonstration test was conducted in mockup constructed in the shop. This paper provides a result of the Super Giraffe demonstration test.
- (1) Components: N/A
- (2) Location:
reactor building
- (3) Materials: N/A
- (4) Condition: disaster site, high radiation environment
Four technical requirements of the demonstration test are as below.
- (1)Performance of decontamination
- (2)Shatterproof performance of contaminated blast materials
- (3)Remote operation(movement, decontamination, cooperation with surrou
- (4)Safety function
- (1)Performance of decontamination
- To appraise the performance of the decontamination equipment, grinding test was conducted. In the test, concrete was grinded by blasting and the depth of grinding was measured. The concrete was painted by epoxy paints that are used in an actual plant. The painted concrete was located at the level of 8m in order to replicate the actual plant situation. (As shown in Fig.4)

Fig.4 Test of decontamination performance in high position
Result of the test is shown as Fig.5. The result revealed that the depth of grinding (0.1mm~0.5mm) correlated with the robotic arm speed (10mm/sec~80mm/sec). Most of the contaminated materials on concrete in reactor buildings exist on the painted surface of the concrete, so the most part of contaminated area on the concrete can be removed by the grinding equipment. On the other hand, though the depth of contaminated penetration is partly 0.5~1.0mm, the materials can be removed by low speed operation of the robotic arm and by repetitive grinding. Besides, concrete in high position is not painted with the epoxy, so non-painted concrete was applied in the test of decontamination performance. Result of the test is shown as Fig.6 and Fig.7. The depth of grinding is deeper than the case of painted concrete.

Fig.5: Decontamination of epoxy-painted concrete surface

Fig.6: Decontamination of unpainted concrete surface

Fig.7 Decontamination of unpainted concrete surface
- (2)Shatterproof performance of contaminated blast materials
- The capability of shatter-proof is essential to prevent the peripheral spread of contaminated blast materials (including concrete powder dusts).
Two quantities were compared in demonstration test described below. -
- 〈Experiment〉
・Blasting painted/unpainted concrete in defined period
〈Two quantities〉
・The quantity of blasting materials which is consumed
・The quantity of contaminated blast materials (including concrete powder dust )- Result of the demonstration test is as shown in Table2.Gathering rate is approximately 100%.
Gathering rate is defined by the following formula and indicates the shatter-proof performance: -
Table2 Gathering rate of contaminated blast materials (including concrette powder dust)


- (3)Remote operation (movement, decontamination ,cooperation with surroundings)
- Super Giraffe has 19 cameras and various sensors such as 3D-LRF, angle sensor, load sensor, and torque sensor. The operators are able to see the circumstances clearly through the virtual images received from the cameras (bird’s-eye view function). Using such functions, Super Giraffe has the high quality remote operability. Fig.8 shows the operation screen of Super Giraffe. [5]
- It is strongly preferred that decontamination equipment used in high-dose rate area is operated remotely. Remote controlled Robots are requested to perform demonstration test in mockups to show reliability before being used in actual reactor buildings. The demonstration test showed capabilities of remotely operated movements and decontaminations. Pictures of the demonstration test are shown in Fig.9.
- Required time for the various movement during blast decontamination (position setting, teaching, blasting) was measured. The measurement showed that the equipment has the capability to decontaminate at the rate of approximately 1.3~1.9㎡/h which depends on conditions.

Fig.8: Controller and PC for Super Giraffe operation

Fig.9: Demonstration of decontamination in mock up (picture)
- (4)Safety function
- Demonstration test, which was simulated the situation of following two troubles, and verified the decontamination equipment would be successfully applied to the reactor building.
- ① trouble of communication system or power source
- Super Giraffe is controlled by wire communication. In case of trouble-communication, power source such as disconnection, the wire communication automatically switch to wireless communication. Power source of Super Giraffe is Lithium-ion battery system (operating time is 5 hours). However, in case that Super Giraffe cannot be controlled and stop due to troubles, it is assumed that the battery is dead in the reactor building. Especially it is very difficult to salvage Super Giraffe whose battery is dead when the ladder is extended. Therefore Super Giraffe is equipped with standby external power and standby hydraulic power to salvage by remote operation.
- ② Emergency of Super Giraffe
- Super Giraffe and the blasting unit are equipped with emergency stop switches. The switches are safety function for abnormal movements, loss of control and operation mistakes. The function is apart from normal control system. The equipment stops immediately by switching.
5. Conclusion
Demonstration test verified that Super Giraffe would be successfully applied to the Fukushima daiichi for decommissioning process.
Acknowledgement
The information of this report includes part of study results which MHI, as a member of IRID, carried out according to the Subsidy Enterprise of Agency of Natural Resources and Energy.
6. Reference
- [1]IRID HP (http://irid.or.jp/research/201509to10/)
- [2]Mitsubishi Heavy Industries, Ltd. E-JAM Vol.5, No.4, NT62 “Remote Controlled Robot with expandable features”
- [3]Jun Fujita, Ken Onishi: “The Development of Robot System “Super Giraffe” for Unmanned Operation on Disaster”, Journal of the Robotics Society of Japan Vol.32, No.2, pp.148-150, 2014
- [4]Ken Onishi, Noriko Onishi, Jun Fujita, Koji Hara Tatsuya Hashimoto: ”Design and Development of Robots which Support Activities of Recovery from Nuclear Hazards”, Journal of the Robotics Society of Japan Vol.32, No.9, pp.816-824, 2014
- [5]Mitsubishi Heavy Industries, Ltd. E-JAM Vol.7, No.1, NT69 “MHI-Tele operated Robot for decontamination and concrete core sampling in Fukushima daiichi reactor buildings”
Japan Society of Maintenology (ejam@jsm.or.jp)
![]()