Vol.5, No.4, NT62
Copyright Journal compliation © 2009-2011 the Japan Society of Maintenology
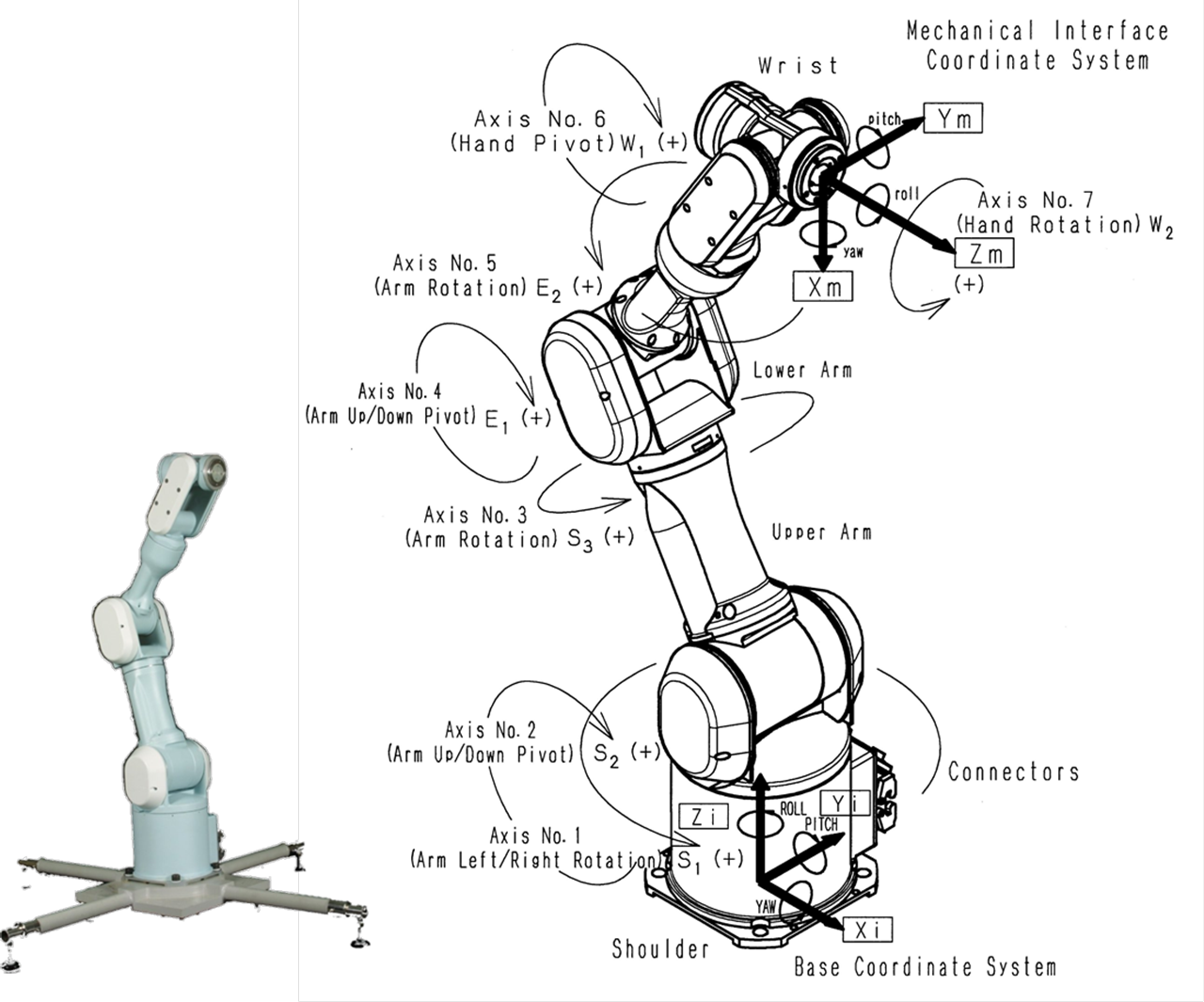
Fig.6 PA-25 robot arm